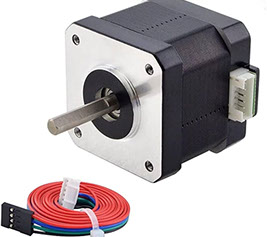
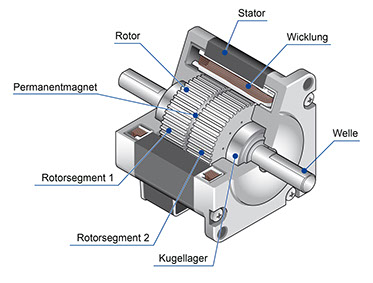
Der STEPPERONLINE Schrittmotor Nema 17 Bipolar 42Ncm 1.5A ist ein vielseitiger und zuverlässiger Schrittmotor, der sich ideal für Anwendungen wie 3D-Drucker, CNC-Fräsmaschinen und andere Automatisierungsprojekte eignet.
Technische Spezifikationen:
-
-
-
-
-
-
-
-
- Merkmal Spezifikation
- Motorentyp Bipolar Schrittmotor
- Schrittwinkel 1,8° (200 Schritte/Umdrehung)
- Haltemoment 45 Ncm (63,74 oz.in)
- Nennstrom/Phase 1,5 A
- Widerstand/Phase 2,3 Ω
- Induktivität/Phase 4,4 mH ± 20 % (1 kHz)
- Abmessungen (BxHxL) 42 x 42 x 39 mm
- Wellen-Durchmesser 5 mm
- Wellen-Länge 24 mm
- Kabellänge 1 m
- Gewicht 280 g
-
-
-
-
-
-
-
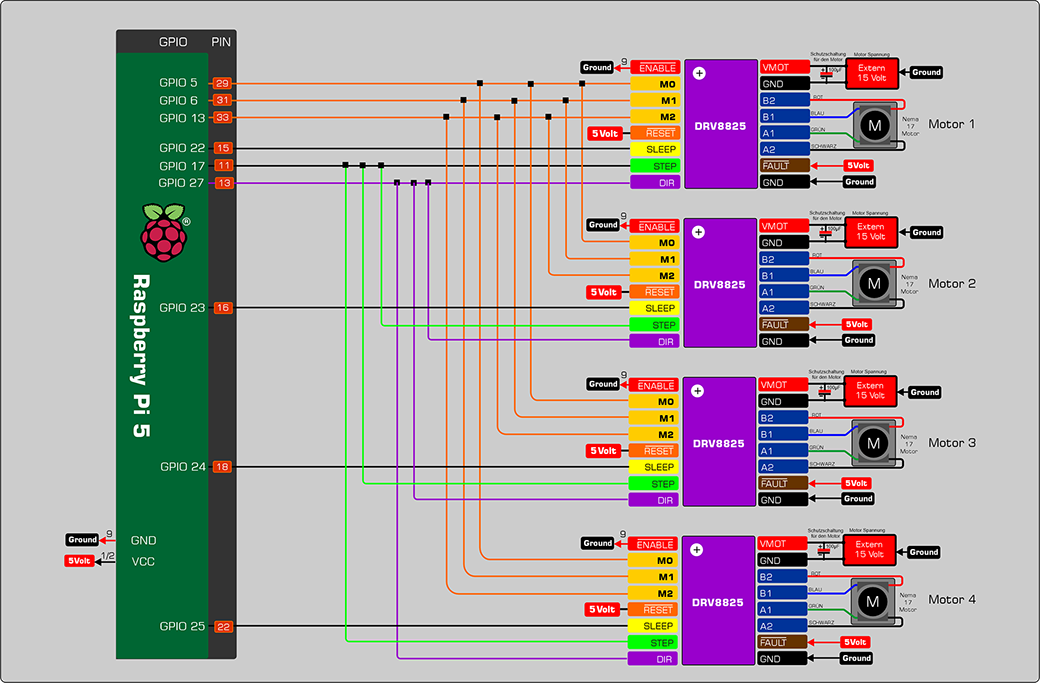
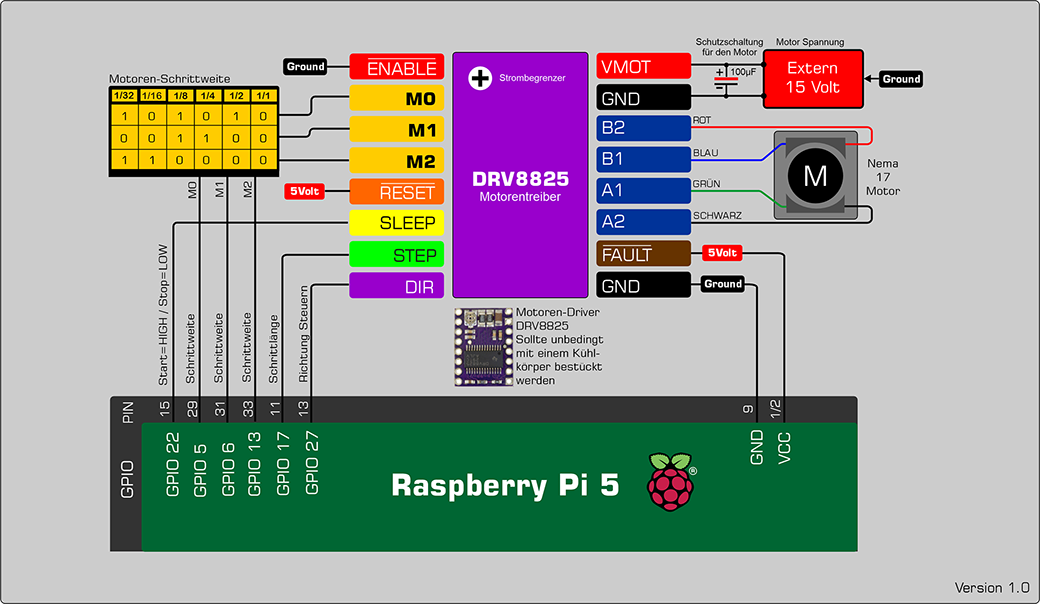
Motorensteuerung mit dem DRV8825
Baustein DRV8825: Welcher Anschluss stoppt den Motor?
Der DRV8825-Schrittmotortreiber kann auf verschiedene Weise gestoppt werden, sodass der Stromverbrauch minimiert oder auf null reduziert wird. Ich werde recherchieren, welche Anschlussoptionen (z. B. "Enable" oder "Sleep"-Pin) den Motor am effizientesten anhalten, ohne dass Strom verbraucht wird. Außerdem werde ich prüfen, ob es weitere Optimierungsmöglichkeiten gibt, um den Verbrauch vollständig zu eliminieren.
Ansteuerung von 4 Steppermotoren mit dem
Raspberry Pi 5